

硬件在环 (HIL) 测试是一种复杂的实时仿真技术,广泛应用于开发和验证电力电子系统。它让工程师无需物理硬件即可测试嵌入式控制系统,从而降低风险、成本和开发时间。
但为什么电动汽车 (EV) 驱动测试需要 HIL?在没有 HIL 仿真的情况下对 EV 电机进行物理测试会带来诸多挑战和风险。
这些包括:
-
安全
-
成本和时间
-
限制测试场景
-
部件损坏风险
-
环境和监管问题
电动汽车电机和相关电力电子设备在高电压和高电流下运行,存在安全隐患,尤其是在测试过程中。构建用于测试的物理原型成本高昂。每次设计迭代通常都需要新的原型,这会增加整体开发成本。
仅通过物理测试来确保符合各种安全和性能标准可能具有挑战性,并且可能需要大量的文档和验证工作。图 1显示了 HIL 相对于 EV 电机物理测试的优势。
图 1.使用 HIL 进行电机驱动器物理测试的优势说明。(图片:Speedgoat – YouTube)
让我们看一下两个以不同方式使用 HIL 来测试电动汽车电机的案例研究。
案例研究 1:速度控制 HIL
进行了一项研究,旨在开发并通过实验验证智能神经网络增强模型预测控制器 (MPC),以使用经济高效的 HIL 方法改善混合动力电动汽车 (HEV) 的速度控制。
使用 Arduino Mega 2560 和 PC 的低成本 HIL 系统实验测试了基于 MPC 的人工神经网络 (NNMPC) 对 HEV 速度的实时控制。
针对 HEV 速度控制,NNMPC 控制器与其他控制器(如 PI、经典 MPC 和不同的 ANN 配置)进行了评估。研究结果表明,HIL 可用于研究电力驱动应用的特性,以用于测试目的,十分可靠。
图 2比较了仿真结果和 HIL 结果,以观察 HEV 的速度响应。仿真结果和 HIL 结果非常接近。
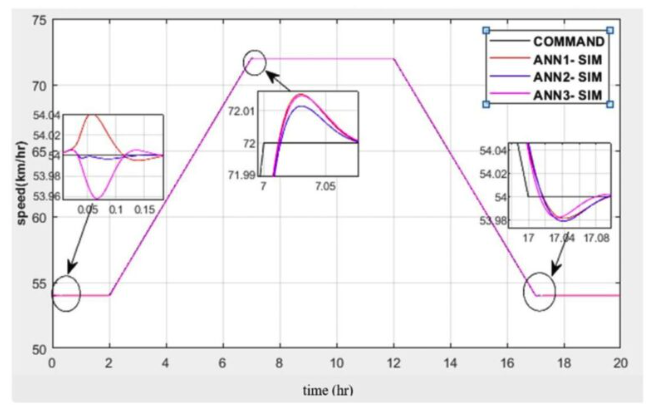
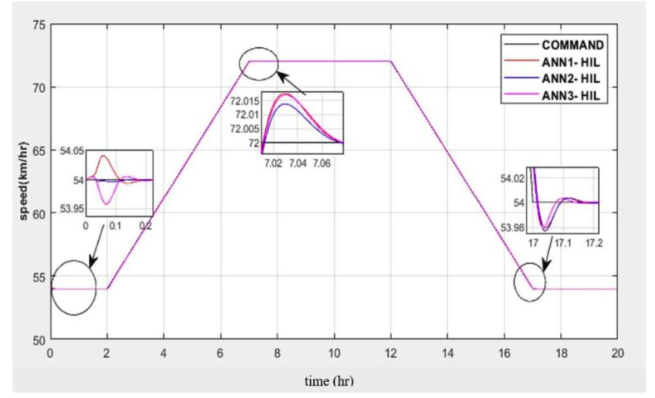
图 2.基于自适应 ANN 的 HEV 速度响应的仿真结果(上)和 HIL 结果(下)比较。(图片:MDPI)
研究的其他性能参数包括瞬态响应、稳态误差和鲁棒性,其中 HIL 与模拟结果相当。
案例研究 2:运动控制和状态估计的 HIL
实现了电动汽车单HIL模型,集成了驱动系统和在dSPACE-DS1103控制卡上实时运行的车辆模型。
这项研究包括两个测试案例。第一个是直线行驶测试,评估油门踏板和刹车踏板在纵向上的性能。第二个是转弯测试,评估系统对周期性转向输入的响应。
试验对驱动系统的测试结果有多种。借助于 MATLAB 内置的 S 函数建模,发现状态变量的提取非常简单。
该 HIL 系统还确保不同的 EV 模型可以在同一设置中使用,只需因电机驱动规格的变化而进行微小改动。
图 3显示了完整的硬件设置,其中外部物理设备是方向盘和制动踏板。
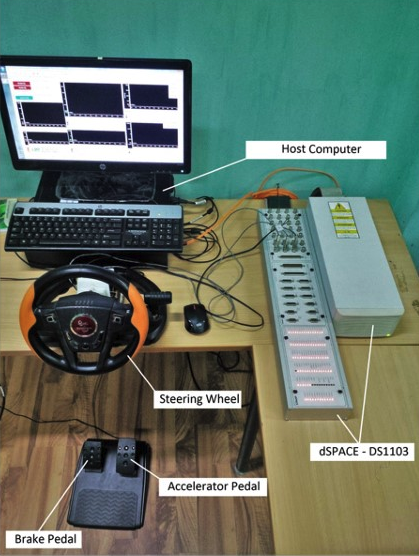
图 3. dSPACE – DS1103 与方向盘、制动踏板和主机 PC 等物理组件一起使用。 (图片:Springer Open)
主机上安装有 MATLAB 软件,用于控制和分析装置。dSPACE—DS1103 是 HIL 装置的核心,与 MATLAB S 函数兼容。
概括
HIL 可以以多种方式用于 EV 电机驱动测试。一种非常常见的用途是使用嵌入式软件进行控制器测试和验证。HIL 是故障注入和安全测试的良好选择,与物理测试相比,这些测试的风险较低。
然而,HIL 也渗透到了集成测试中,其中其他车辆测试(例如电池管理系统和电力电子设备)也同时进行测试。因此,HIL 是一项很有前途的技术,很可能会扩大电动汽车技术进步的范围。
文章转载自微信公众号:汽车研究院auto